


Roboții controlați de la distanță lucrează din ce în ce mai mult în situații de urgență, cum ar fi căutarea supraviețuitorilor clădirilor prăbușite.

Detectarea materialelor potențial periculoase, a situațiilor cu ostatici sau a altor măsuri de aplicare a legii și de combatere a terorismului. Acest echipament special de operare de la distanță utilizează micromotoare de înaltă precizie în locul lucrătorilor umani pentru a efectua operațiunile periculoase necesare, ceea ce poate reduce semnificativ riscul pentru personalul implicat. Manipularea precisă și manipularea precisă a sculelor sunt două condiții prealabile importante.
Pe măsură ce tehnologia continuă să evolueze și să se îmbunătățească, roboții pot fi aplicați în sarcini mai complexe și mai provocatoare. Drept urmare, roboții sunt acum din ce în ce mai des utilizați în situații de urgență prea periculoase pentru oameni - ca parte a operațiunilor industriale, a măsurilor de aplicare a legii sau de combatere a terorismului, cum ar fi identificarea obiectelor suspecte sau dezamorsarea bombelor. Din cauza unor astfel de condiții extreme, aceste vehicule manipulatoare trebuie să fie cât mai compacte posibil pentru a îndeplini cerințe specifice. Brațele lor de prindere trebuie să permită modele de mișcare flexibile, demonstrând în același timp precizia și puterea necesare pentru a gestiona o gamă largă de sarcini diferite. Consumul de energie joacă, de asemenea, un rol cheie: cu cât acționarea este mai eficientă, cu atât durata de viață a bateriei este mai lungă. Micromotoarele speciale de înaltă performanță au devenit o parte importantă a domeniului roboților cu telecomandă, ele îndeplinind perfect aceste nevoi.
Acest lucru este valabil și pentru roboții de recunoaștere mai compacți.

Care sunt echipate cu camere video și uneori chiar aruncate direct la locul de utilizare, așa că trebuie să poată rezista la șocuri, alte vibrații și praf sau căldură în zone mai potențial periculoase. În acest caz, nicio ființă umană nu poate merge direct la muncă pentru a căuta supraviețuitori. Ugv-urile (vehicule terestre fără șofer) pot face exact asta. Și, datorită micromotorului de curent continuu FAULHABER, cuplat cu un reductor planetar care crește cuplul, acestea sunt extrem de fiabile. Dimensiunile reduse ale UGV-urilor permit căutări fără riscuri ale clădirilor prăbușite și transmit imagini în timp real, ceea ce le face un instrument important de luare a deciziilor pentru echipele de intervenție în caz de urgență atunci când vine vorba de răspunsuri tactice.
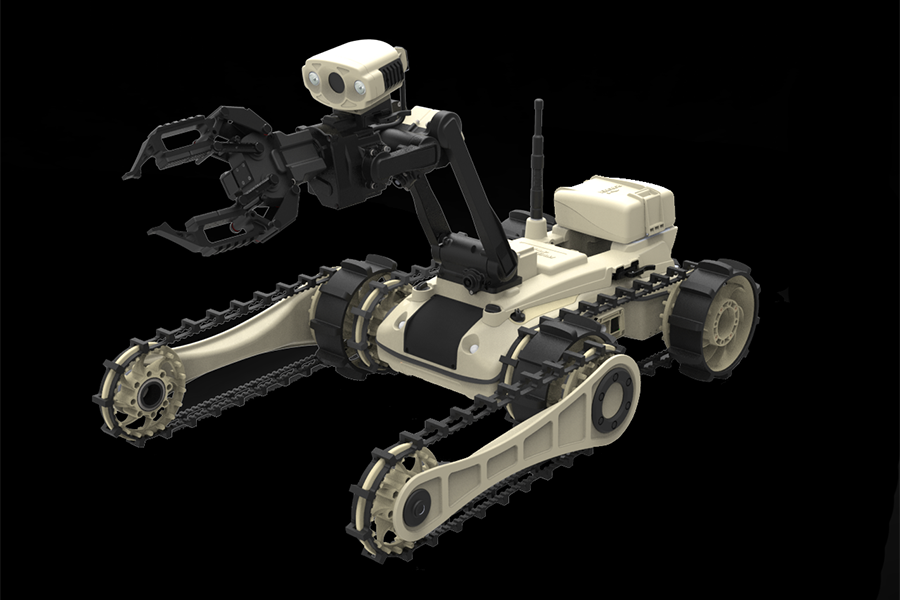
Motor de curent continuu de precizie și angrenaj realizat dintr-un dispozitiv de acționare compact, potrivit pentru o varietate de sarcini de conducere. Acești roboți sunt robusti, fiabili și ieftini.
Astăzi, roboții mobili sunt utilizați în mod obișnuit în situații critice în care există un risc semnificativ pentru oameni și în anumite operațiuni industriale.

Măsuri de aplicare a legii sau antiteroriste, cum ar fi identificarea obiectelor suspecte sau dezactivarea bombelor. În aceste cazuri extreme, acești „operatori de vehicule” trebuie să îndeplinească nevoi specifice. Manipularea precisă și manevrarea precisă a sculelor sunt două condiții prealabile de bază. Desigur, dispozitivul trebuie să fie cât mai mic posibil pentru a se potrivi prin pasaje înguste. Firește, actuatoarele utilizate de astfel de roboți sunt destul de remarcabile. Micromotoarele speciale de înaltă performanță au devenit o componentă importantă.

Acestea fiind spuse, ridicarea a 30 kg la capătul brațului este deja o provocare destul de mare.
În același timp, sarcini specifice necesită precizie, mai degrabă decât forță brută. În plus, spațiul pentru ansamblul brațului este foarte limitat. Prin urmare, actuatoarele ușoare și compacte sunt o necesitate pentru clești. Pentru a îndeplini aceste cerințe dificile, asigurați-vă că cleștii trebuie să se poată roti la 360 de grade, respectând în același timp precizia și capacitatea necesare pentru a gestiona o varietate de sarcini diferite.
Consumul de energie joacă, de asemenea, un rol cheie atunci când se utilizează dispozitive alimentate cu baterii. Cu cât eficiența transmisiei este mai mare, cu atât timpul de funcționare este mai lung. „Problema acționării” este rezolvată folosind un micromotor de curent continuu cu angrenaje planetare și frâne. Motorul din seria 3557 poate funcționa până la 26w la o tensiune nominală de 6-48v și, împreună cu angrenajul presetat din seria 38/2, pot crește forța de acționare la 10Nm. Angrenajele integral metalice nu sunt doar robuste, ci și insensibile la sarcinile de vârf tranzitorii. Rapoartele de decelerare pot fi selectate de la 3,7:1 la 1526:1. Angrenajul compact al motorului va fi aranjat strâns în regiunea superioară a manipulatorului. Frânarea integrată asigură poziția finală în caz de pană de curent. În plus, componentele compacte sunt ușor de întreținut, iar piesele defecte pot fi înlocuite rapid. Un alt avantaj cheie: Motoarele puternice de curent continuu cu perii necesită doar comenzi simple de limitare a curentului. Feedback-ul intensității curentului este aplicat manetei telecomenzii prin contrapresiune, oferind operatorului o senzație de forță pentru a aplica cleștele sau „încheietura mâinii”. Ansamblul compact de acționare este compus dintr-un motor de curent continuu precis și un angrenaj de reglare. Potrivit pentru diverse sarcini de conducere. Sunt puternice, fiabile și ieftine. Funcționarea simplă a motorului cu componente standard îndeplinește cerințele de ieftin, rapid și fiabil.